多边形点集排序
创始人
2024-05-06 13:13:03
0次
一、问题描述
已知多边形点集P = {P1, P2, ... , PN},其排列顺序是杂乱,依次连接这N个点,无法形成确定的多边形,需要对点集P进行排序后,再绘制多边形。
二、排序规则
点集排序过程中,关键在于如何定义点的大小关系。以按顺时针排序为例,算法步骤如下。
2.1 定义点的大小
定义:点A在点B的顺时针方向,则点A大于点B
计算点集的重心O,以重心作为逆时针旋转的中心点。
计算点之间的大小关系。
大小关系的计算,可由两种方法进行计算。
2.2 大小关系判定
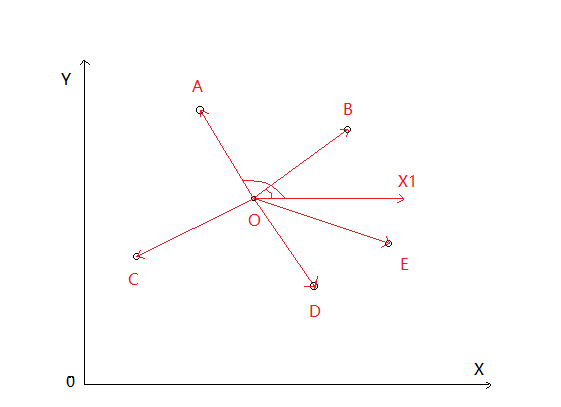
2.2.1 根据夹角判定
以重心O作一条平行于X轴的单位向量OX1,然后依次计算OP和OX1的夹角。根据夹角的大小,确定点之间的大小关系。OP和OX1夹角越大,说明点P越小,如图所示。
2.2.2 根据向量叉积判定
根据向量叉积的定义,向量OA和OB的叉积大于0,则向量OB在向量OA的逆时针方向,即点B小于点A。反之,向量OB在向量OA的顺时针方向,即点B大于点A。
三、代码实现
依据2.2.2节中的向量叉积方法,多边形点集排序的代码如下:
//点集排序
//若点A大于点B,即点A在点B顺时针方向,返回true,否则返回false
bool PointCompare(const cv::Point &a, const cv::Point &b, const cv::Point ¢er)
{if (a.x >= 0 && b.x < 0)return true;if (a.x == 0 && b.x == 0)return a.y > b.y;//向量OA和向量OB的叉积int det = (a.x - center.x) * (b.y - center.y) - (b.x - center.x) * (a.y - center.y);if (det < 0)return true;if (det > 0)return false;//向量OA和向量OB共线,以距离判断大小int d1 = (a.x - center.x) * (a.x - center.x) + (a.y - center.y) * (a.y - center.y);int d2 = (b.x - center.x) * (b.x - center.y) + (b.y - center.y) * (b.y - center.y);return d1 > d2;
}
// 顺时针方向排序
void ClockwiseSortPoints(std::vector &vPoints)
{//计算重心cv::Point center;int count_size = vPoints.size();double x = 0, y = 0;for (int i = 0; i < count_size; i++){x += vPoints[i].x;y += vPoints[i].y;}center.x = (int)x / count_size;center.y = (int)y / count_size;//冒泡排序for (int i = 0; i < count_size - 1; i++){for (int j = 0; j < count_size - i - 1; j++){if (PointCompare(vPoints[j], vPoints[j + 1], center)){cv::Point tmp = vPoints[j];vPoints[j] = vPoints[j + 1];vPoints[j + 1] = tmp;}}}return;
} 四、参考资料
http://blog.csdn.net/beyond071/article/details/5855171
http://stackoverflow.com/questions/6989100/sort-points-in-clockwise-order
相关内容
热门资讯
【PdgCntEditor】解...
一、问题背景 大部分的图书对应的PDF,目录中的页码并非PDF中直接索引的页码...
在Word、WPS中插入AxM...
引言 我最近需要写一些文章,在排版时发现AxMath插入的公式竟然会导致行间距异常&#...
监控摄像头接入GB28181平...
流程简介将监控摄像头的视频在网站和APP中直播,要解决的几个问题是:1&...
修复 爱普生 EPSON L4...
L4151 L4153 L4156 L4158 L4163 L4165 L4166 L4168 L4...
protocol buffer...
目录 目录 什么是protocol buffer 1.protobuf 1.1安装 1.2使用...
Windows10添加群晖磁盘...
在使用群晖NAS时,我们需要通过本地映射的方式把NAS映射成本地的一块磁盘使用。 通过...
【前端】‘??‘与‘||‘有什...
0 问题 经常写const data = res.data.a ?? ''或者const d...
ChatGPT 怎么用最新详细...
ChatGPT 以其强大的信息整合和对话能力惊艳了全球,在自然语言处理上面表现出了惊人...
Fluent中创建监测点
1 概述某些仿真问题,需要创建监测点,用于获取空间定点的数据...